Moment setrvačnosti – klíč k úspěchu
4. 2. 2026 | Už jste někdy ladili servopohon na stroji, všechno se zdálo být v pořádku – motor dostatečně silný, převod zvolený správně – ale přesto se soustava při zastavení rozkmitala? Nebo se nepodařilo zastavit přesně tam, kde bylo třeba?
Možná nebyl problém v motoru, ale v něčem méně nápadném: momentu setrvačnosti. Tahle „nenápadná veličina“ (označovaná jako J, jednotky kg·m²) může být rozhodující. Často se na ni při návrhu úplně zapomíná nebo se podcení – a výsledkem je nepřesný, neklidný pohyb, nebo přetížený pohon.
Co že to ten Moment setrvačnosti je?
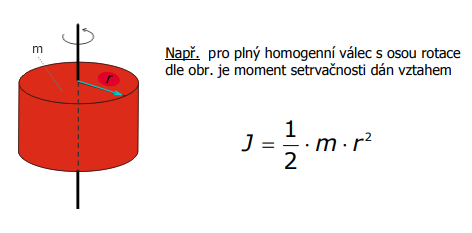
Moment setrvačnosti (inertia, J = ?? kg.cm2) je fyzikální veličina, která vyjadřuje míru setrvačnosti tělesa při otáčivém pohybu. Její velikost závisí na rozložení hmoty v tělese vzhledem k ose otáčení a zda osa otáčení prochází či neprochází těžištěm tělesa. Největší setrvačnost (J) má těleso, které má hmotu (resp. své těžiště) soustředěno, co nejdále od osy rotace. Velikosti momentů setrvačnosti pro homogenní pravidelná tělesa lze nalézt v běžných fyzikálních tabulkách.
Proč by nás měl zajímat?
Velmi zjednodušeně – čím větší moment setrvačnosti má těleso, tím více energie potřebuje ke změně rychlosti. Pokud motor nemá dostatečně velký moment setrvačnosti (vlastní „hmotu rotace“) nebo není správně sladěný s celým mechanismem (poměr momentů setrvačnosti rotoru vůči zátěži), nemá šanci to zvládnout „s přehledem“. Výsledkem může být přetížení, nestabilita a zákmity v polohování vedoucí někdy až k nezastavitelnému rozkmitání servo pohonu.
Návrh strojů probíhá v dnešní době nejčastěji pomocí nějakém CAD softwaru, kde se modelují jednotlivé díly a sestavy. Velká většina těchto softwarů umí dle hmotností a materiálů jednotlivých komponent rovněž definovat moment setrvačnosti v ose rotace.
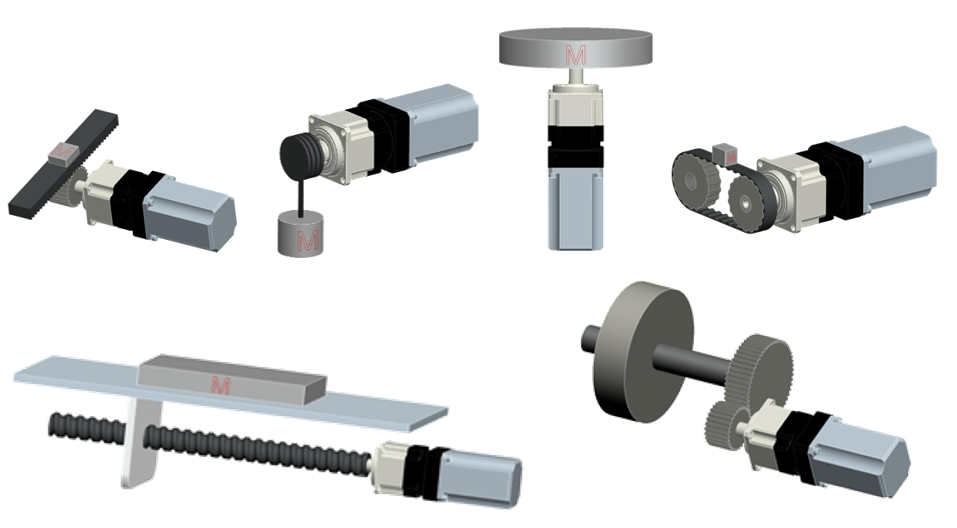
Určení vhodného servo pohonu i pro lineární pohyb
Otočný stůl (karusel), ozubený hřeben a pastorek, lineární (přímočarý) modul, kuličkový šroub, kartézský systém nebo AGV vozítko?
Při se dimenzování vhodného servopohonu pro jakoukoliv aplikaci sleduje rovněž tzv. poměr momentu setrvačnosti zátěže a motoru (λ) – měl by být v doporučeném rozmezí. Jaké je to rozmezí? V ideálním případě musí být λ < 5. Pro velmi dynamické operace, CNC řízení < 3. Do λ > 10 max. lze servopohon v lehčích aplikacích rovněž uřídit. Jak to vypadá z pohledu fyzikálních veličin?

JL=Moment setrvačnosti tělesa
JG=Moment setrvačnosti převodovky
i = převodový poměr
JM=Moment setrvačnosti motoru
Z výše uvedeného vzorce je patrné, že největší vliv má převodový poměr umocněn na druhou (i2), díky kterému lze „rozbít“ setrvačné hmoty a setrvačnost rotoru servo pohonu. Vložením převodu mezi motor a pohybující část vede ale ke zpomalení rychlostí (polohování), což v dynamických aplikacích nemusí být žádoucí a ztrácí se tak drahocenný čas.
Není moment jako moment
Když se řekne „moment“, většina si vybaví točivý moment motoru. Ale moment setrvačnosti je stejně důležitý – a klíčový hlavně pro aplikace s cyklickým pohybem, rychlým zastavením nebo požadavkem na vysokou přesnost.
Závěrem: Co když si nejste jistí?
Nezoufejte – my v APEX DYNAMICS vám s výpočtem a dimenzováním vhodného pohonu rádi pomůžeme. Díky široké škále převodových poměrů a obrovské databázi servo motorů všech světových výrobců vč. klíčových parametrů jsme schopni za pomoci našeho Konfigurátoru a výpočtového nástroje Dynamax určit nejenom vhodnou převodovku, ale i vhodný pohon vámi preferovaného výrobce.
S výpočtem a dimenzováním vám klidně rádi pomůžeme. Pokud chcete předejít problémům, můžeme váš návrh překontrolovat a přepočítat. K tomu ale budeme potřebovat pár základních údajů:
- Hmotnost přepravovaného břemene
- Vzdálenost, kterou je potřeba překonat
- Čas, za který se musí pohyb uskutečnit
- Lehký popis aplikace, která bude s břemenem pohybovat
Berme to jako další kousek skládačky při návrhu celého pohonného systému. A pokud potřebujete pomoc – jsme tu pro vás.
Pro profesionální podporu při výběru produktů, které budou přesně vyhovovat vašim potřebám, nás neváhejte kontaktovat. Víme, o čem mluvíme.