Efektivní převodovky pro AGV
16.11.2020 | Také se vám vybaví při pohledu nebo na legendární automobil „KITT“ slovo samořiditelné auto nebo na „Termonátora“ slovo robot? Jelikož se v automatizaci a robotizaci podnikají velké pokroky, pravděpodobně jste již narazili i na mnohem méně „sexy“ robota: AGV. Automated Guided Vehicle neboli automaticky řízený vozík. Tyto prostředky se čím dál častěji využívají k přepravě materiálu nebo nástrojů. To umožňuje logistickým profesionálům přesné nastavení toků spojené s úsporou času a zvýšením vlastní efektivity.
AGV v logistice

Vývoj v oblasti automaticky řízených vozíků jde velkým tempem kupředu: například firma Vanderlande (Nizozemsko) vyvinula aplikaci s AGV sloužící k přepravě a manipulaci zavazadel na letišti. Letiště v Lelystadu je první holandské letiště, kde byly tyto AGV uvedeny do běžného provozu. Po českých a slovenských továrnách a skladech se již prohání stovky AGV v rámci pilotních nebo hotových projektů.
Tito mobilní roboti nachází uplatnění zejména v provozech, kde se pravidelně přesouvá lehčí náklad na delší vzdálenosti. Nejčastěji se v průmyslových aplikacích používají k přepravě materiálu nebo ve velkých skladech k přepravě zboží. Od konce 20. století získávají tito roboti v logistickém sektoru každoročně stále větší význam.
Jak se AGV orientuje v provozu?
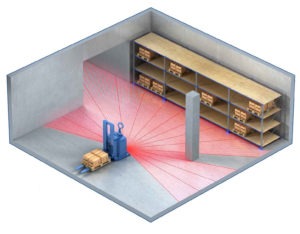
Autonomně řízené vozíky jsou mobilní roboti využívající ke své navigaci různých značek, vodičů v podlaze, magnetických pásků anebo sofistikovanějších instrumentů. Díky způsobu orientace a řízení jsou rovněž známi pod jinými označeními jako LGV (laserově řízená vozítka), SGV (samořiditelná vozítka), jakož i dálkově řízené vozíky, autonomní vozíky, AMR (mobilní roboti), UGV (bezpilotní pozemní vozidla) a další podobné variace.
Bez ohledu na konstrukci řídí AGV automatický naváděcí systém, který pohání AGV a vyhodnocuje jeho polohu v prostoru. Většina strojů využívá jednu nebo kombinaci více metod pro automatickou navigaci založené na některém z těchto principů:
- Vedení v dráze – senzory detekující magnetické nebo barevné pásky na podlaze, příp. vodiče umístěné v podlaze.
- Systémy SLAM – (Simultánní Lokalizace A Mapování) určující orientaci a polohu robota vytvořením mapy okolního prostředí. Nejběžnější systémy SLAM vyžívají optické senzory a skenery. Dva nejčastější jsou vizuální SLAM (VSLAM, založený na kameře) nebo LiDAR (laserové měření vzdálenosti).
- Bodová lokalizace – pomocí odrazek, čárových a QR kódů na podlaze nebo čtení RFID.
- Rádiová lokalizace – pomocí identifikace a komunikace v GPS, GSM nebo UWB síti.
Požadavky na pohony mobilních robotů
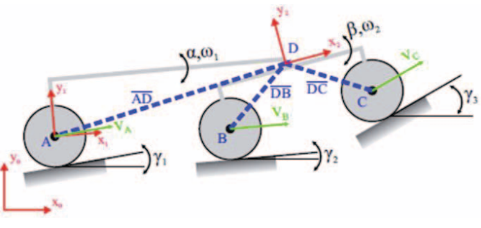
Rozměrově menší AGV mají obvykle 3-4 kola, z nichž nejčastěji dvě, paralelně umístěná, jsou hnaná a zbývající slouží jako podpěrná. Pokud se poháněná kola otáčí rovnoměrně, pak AGV jede rovně, pokud některé jede pomaleji nebo dokonce opačným směrem dochází k zatáčení/otáčení robota. U těžkotonážních AGV vozidel jsou k řízení využívány doplňkové řídicí mechanismy kol a často také několik řiditelných náprav.
Požadavky na nepřetržitý provoz vozíků a přepravy kladou vysoké nároky jak na kvalitu konstrukční, tak i na velkou mechanickou odolnost dílů, a to platí i u převodovek. Ty se využívají hlavně k pohonu autonomních vozíků.

V závislosti na konstrukci podvozku spočívá celá hmotnost vozidla a užitečného zatížení přímo na výstupním ložisku převodovky, protože ta se nejčastěji ukrývá přímo v poháněném kole. To má za následek působení vysokých radiálních sil a klopných momentů. Navíc kvůli omezenému prostoru musí být převodovka mimořádně kompaktní s prostorově úspornou konstrukcí.
Pro všechny elektricky poháněná vozidla je rovněž omezujícím prvkem kapacita akumulátorů. Proto je velmi důležité co nejefektivněji přeměnit elektrickou energii na kinetickou.
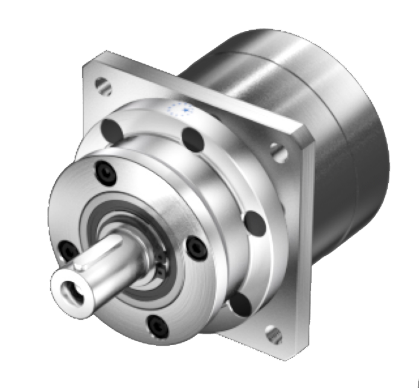
Právě z výše uvedených důvodů, a aby ulehčil práci všem nadšeným konstruktérům, uvádí APEX DYNAMICS na trh řadu GL – kompaktních planetových převodovek s vysokou účinností a vysokým radiálním zatížením, která odpovídá výše uvedeným požadavkům a aktuálním trendům v konstrukci AGV.
Mezi hlavní přednosti řady GL patří:

- Vysoké radiální zatížení výstupní příruby s možností přímé montáže kola.
- Vysoká účinnost až 97%, díky které dochází k minimálním ztrátám.
- Nízká vůle v převodech pro precizní řízení.
- Optimalizovaný moment setrvačnosti pro velkou dynamiku.
- Limitovaný vzestup teploty zamezující přehřívání.
- Velké výstupní kroutící momenty v malém těle.
- Dlouhá životnost.
Volba pohonu dle podvozku
K rozpohybování autonomních vozítek se nejčastěji používají servopohony nebo krokové a BLDC motory. K planetovým převodovkám řady GL je možné připojit téměř jakýkoli motor předních výrobců pohonů, o čemž se můžete přesvědčit v našem on-line konfigurátoru. Planetová převodovka GL i s motorem je pak pomocí čtvercové montážní příruby upevněna přímo na podvozku AGV. To se týká nejčastěji AGV s pevným podvozkem.
Co když ale navrhujete sofistikovanější podvozek s nezávislým zavěšením kol nebo UGV do terénu s tzv. lokomočním ústrojím (kola na ramenou)? Zde není žádoucí přímé napojení pohonu. Pohon pak musí být vzdálen od kol, aby nepřekážel v terénu.
I pro takové zvláštní případy má APEX DYNAMICS řešení. A to v podobě GLS – na vstupu s plnou hřídelí. Ke hřídeli lze připojit řemenice, torzní tyče a další mechanické komponenty k přenosu točivého momentu ze vzdáleného pohonu.
Osvědčené řešení
Na základech více jak třicet let nashromážděných zkušeností jsme schopni rovněž vypočítat minimální požadavky na samotný pohon příp. doporučit přímo optimální typ z pohonu od vámi preferovaného výrobce. Naši zákazníci a partneři oceňují naši vysokou technickou odbornost a poradenství spolu s komplexními nabídkami včetně konkrétních řešení jejich požadavků na aplikace.
Jsme specialisté v oblasti automatizační techniky a své práci rozumíme. Nevěříte? Tak to zkuste. S námi jste vždy o krok napřed!